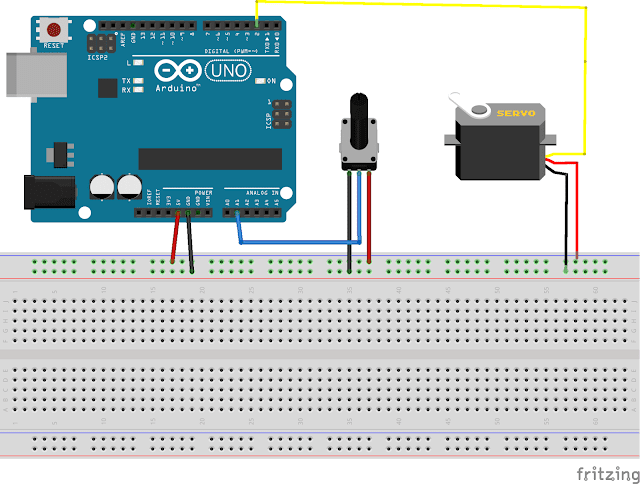
Joystick Servo Kontrolü
#include<Servo.h> Servo motor1; int xPin = A0; int yPin = A1; int xPozisyonu = 0; int yPozisyonu = 0; int mtr1_aci; void setup() { Serial.begin(9600); motor1.attach(3); pinMode(xPin, INPUT); pinMode(yPin, INPUT); } void loop() { xPozisyonu = analogRead(xPin); yPozisyonu = analogRead(yPin); mtr1_aci=map(xPozisyonu,0,1023,0,180); motor1.write(mtr1_aci); Serial.print("X Pozisyonu: "); Serial.println(mtr1_aci); delay(100); }